桁架机器人和关节机器人在结构设计、承载能力、运动范围、工作精度、灵活性以及适用场景等方面存在明显的区别。桁架机器人适用于需要在特定直线轨迹上进行精确操作的场景,而关节机器人适用于需要灵活自由移动和完成复杂任务的场景。了解它们之间的区别有助于我们选择适合特定需求的机器人类型,提高工作效率和质量。

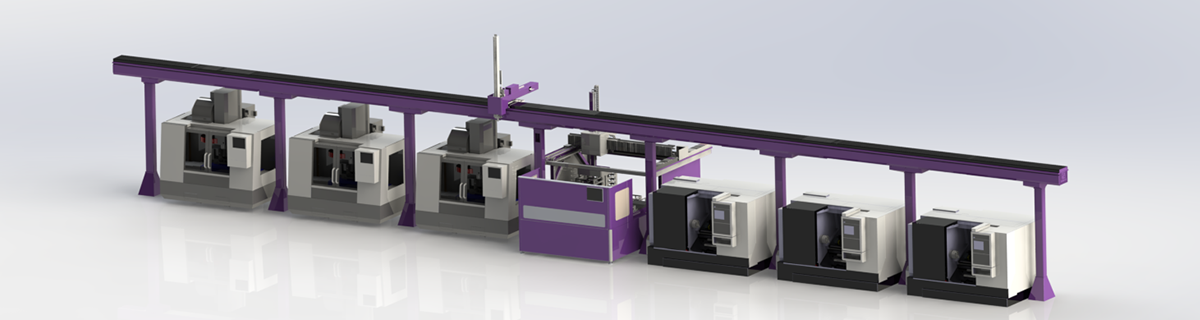
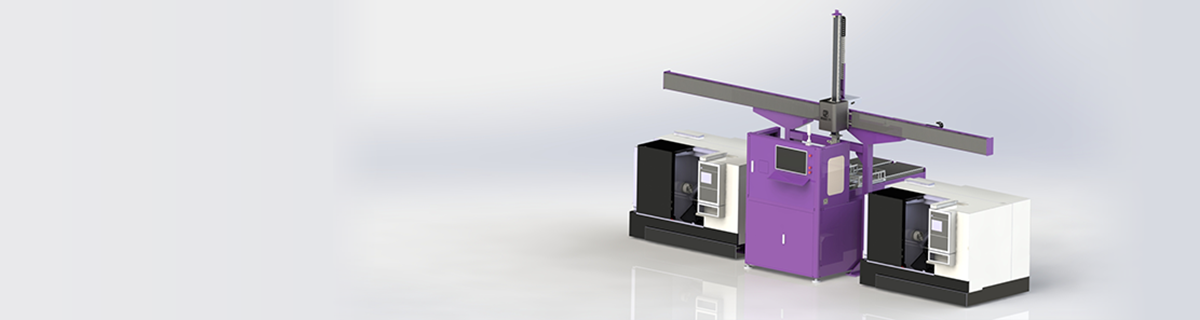
1.结构设计的区别:桁架机器人采用桁架结构,通常由一组平行排列的杆件和节点构成。这些杆件和节点由刚性连接件连接起来,形成一个稳定的框架结构。桁架机器人的关节连接在节点上,通过节点的旋转来实现运动。关节机器人则由多个链接或杆件构成,每个杆件都通过关节连接,关节之间的旋转使机器人能够在三维空间内自由移动。
2.运动范围的区别:由于结构的差异,桁架机器人和关节机器人的运动范围也存在一定的区别。桁架机器人的桁架结构决定了其运动轨迹通常为直线或近似直线。它的运动轨迹受限,只能在预定的平面内进行直线运动,适用于一些需要在特定直线轨迹上进行精确操作的场景。而关节机器人的运动范围相对较大,可以在多个平面内进行自由灵活的运动,适用于需要在多个方向上进行操作的场景。

3.灵活性的区别:桁架机器人在结构上存在一定的限制,其设计和运动模式相对固定,因此其灵活性相对较低。它的刚性结构使其在承载能力和稳定性方面表现出色,适用于很多需要高强度和稳定性能的任务。相比之下,关节机器人具有较高的灵活性,能够快速适应不同的任务和工作环境,其可编程性和自由度较大,适用于灵活变化的操作任务。
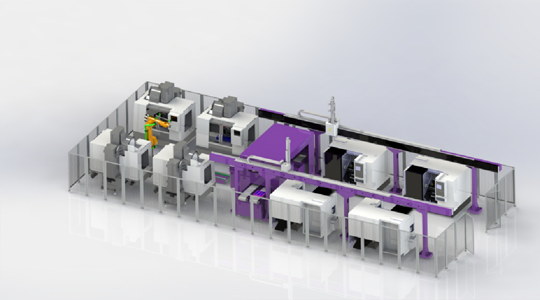
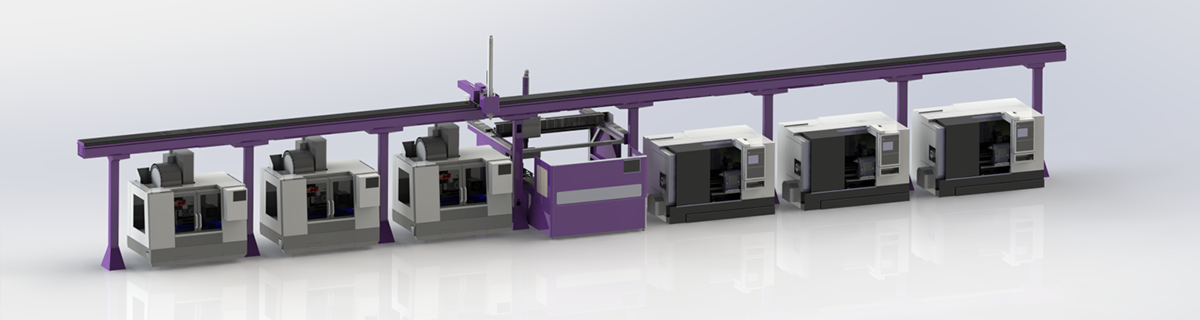
4.适用场景的区别:由于结构和性能的不同,桁架机器人和关节机器人在使用场景上也存在区别。桁架机器人广泛应用于工厂的物料搬运、流水线装配等需要沿直线移动和精确定位的任务。关节机器人在电子制造、零件加工、医疗护理等领域有广泛应用,可以完成较为复杂和精细的操作,如装配、焊接、剪裁等。

5.承载能力不同:桁架机器人采用运动控制系统实现对齐的驱动及编程控制,直线、曲线等运动轨迹生成为多点插补方式,其所能抓取的重量能高达6吨。关节机器人与人类的手臂相似,能够像人类的手臂一样灵活的动作,其所能抓取的重量根据应用设置不同的重量,能抓取重量到达450kg左右。
6.工作精度不同:由于桁架机器人的结构较为简单,所以重复定位精确度约为0.05mm,相比之下关节机器人的结构较为复杂,重复定位更高约为0.02mm甚至更高。
声明:凡资讯来源注明为其他媒体来源的信息,均为转载自其他媒体,并不代表本网站赞同其观点,也不代表本网站对其真实性负责。您若对该文章内容有任何疑问或质疑,请立即与清智科技官网(www.tsingzhikj.com)联系,本网站将迅速给您回应并做处理。